در راهنمای خرید بهترین الکتروموتور در چند مرحله ساده امروز قصد داریم به تمام نکات مهمی بپردازیم که در هنگام انتخاب الکتروموتور باید به آنها توجه داشته باشید. شما باید الکتروموتور خود را عوض کنید و می خواهید بدانید که به کدام موتور الکتریکی نیاز دارید. پیدا کردن الکتروموتور جایگزین همیشه کار ساده نیست نیست. ممکن است لازم باشد یک مدل قدیمی منسوخ شده یا متوقف شده را جایگزین کنید. برای کمک به شما اطلاعات مفیدی را در ادامه آورده ایم که می توانید دنبال کنید. توجه داشته باشید که در این مقاله فرض ما الکتروموتور ۳ فاز است، زیرا رایج ترین نوع الکترموتوری است که استفاده می شود. در بسیاری از مواقع تمام اطلاعات را می توان از روی پلاک الکتروموتور بدست آورد، اگر نحوه پلاک خوانی را یاد ندارید می توانید مقاله قبلی همگام صنعت سعدی را دنبال کنید.
موتور ها چگونه کار می کنند و چگونه موتور مناسب را انتخاب کنیم؟
موتور ها را می توان عملاً در همه جا پیدا کرد. این راهنما به شما کمک می کند تا اصول اولیه موتور های الکتریکی، انواع موجود و نحوه انتخاب موتور صحیح را بیاموزید. سؤالات اساسی که باید هنگام تصمیم گیری اینکه کدام موتور برای یک برنامه مناسب است پاسخ دهید این است که کدام نوع را انتخاب کنم و کدام مشخصات مهم است.
موتور ها چگونه کار می کنند؟
موتور های الکتریکی با تبدیل انرژی الکتریکی به انرژی مکانیکی به منظور ایجاد حرکت کار می کنند. نیرو از طریق تعامل بین میدان مغناطیسی و سیم پیچ جریان متناوب (AC) یا مستقیم (DC) در موتور ایجاد می شود. با افزایش قدرت جریان، قدرت میدان مغناطیسی نیز افزایش می یابد. قانون اهم (V = I*R) را به خاطر بیاورید. طبق این قانون، ولتاژ باید افزایش یابد تا با افزایش مقاومت، همان جریان را حفظ کند.
موتور های الکتریکی مجموعه ای از کاربرد های مختلف را دارند. مصارف صنعتی متعارف شامل دمنده ها، ماشین آلات و ابزار های برقی، فن ها و پمپ ها می باشد. علاقهمندان معمولاً از موتور ها در کاربرد های کوچکتری هم استفاده می کنند که نیاز به حرکت دارند، مانند صنایع روباتیک یا ماژول های چرخ دار.
انواع موتور
انواع مختلفی از موتور های DC وجود دارد، اما رایج ترین آنها براش لس یا بدون جاروبک است. موتور های ویبره، استپر موتور و سروو موتور نیز وجود دارد.
موتور های براش DC یکی از ساده ترین موتور ها هستند و در بسیاری از لوازم خانگی، اسباب بازی ها و اتومبیل ها یافت می شوند. آنها از برس های تماسی استفاده می کنند که با یک کموتاتور برای تغییر جهت جریان متصل می شوند. تولید آنها ارزان است و کنترل آنها ساده است و گشتاور بسیار خوبی در سرعت های پایین (برحسب دور در دقیقه یا RPM اندازه گیری می شود) دارند. چند نکته منفی این است که برای جایگزینی برس های فرسوده نیاز به نگهداری مداوم دارند، به دلیل گرم شدن برس سرعت محدودی دارند و می توانند صدای الکترومغناطیسی را از قوس برس ایجاد کنند.
موتور های DC بدون جاروبک یا براش لس، از آهنربا های دائمی در مجموعه روتور خود استفاده می کنند. آنها در بازار برای کاربرد های هواپیما و وسایل نقلیه زمینی محبوب هستند. آنها کارآمدتر هستند، نیاز به تعمیر و نگهداری کمتری دارند، صدای کمتری تولید می کنند و چگالی توان بالاتری نسبت به موتور های DC برس دار دارند. آنها همچنین می توانند به تولید انبوه برسند و شبیه یک موتور AC با RPM ثابت باشند، مگر اینکه از جریان DC تغذیه شوند. با این حال، چند عیب وجود دارد، که شامل این است که کنترل کردن آنها بدون داشتن تنظیم کننده تخصصی، دشوار است و به بار های راه اندازی کم و گیربکس های تخصصی در کاربرد های درایو نیاز دارند که باعث می شود هزینه سرمایه، پیچیدگی و محدودیت های زیست محیطی بالاتری داشته باشند.
سایر موتور ها
موتور های ارتعاشی برای کاربردهایی که نیاز به لرزش دارند مانند تلفن های همراه یا کنترلر های بازی استفاده می شود. آنها توسط یک موتور الکتریکی تولید می شوند و دارای یک جرم نامتعادل در محور محرک هستند که باعث ایجاد لرزش می شود. همچنین می توان از آن ها در زنگ های غیرالکترونیکی که به منظور صدا یا زنگ هشدار یا زنگ در می لرزند، استفاده کرد.
هر زمان که موقعیت یابی دقیق در میان باشد، موتور های پله ای دوست شما هستند. آنها در چاپگر ها، ماشین ها و سیستم های کنترل فرآیند یافت می شوند و برای گشتاور بالا ساخته شدهاند که به کاربر توانایی حرکت از یک مرحله به مرحله دیگر را می دهد. آنها یک سیستم کنترلی دارند که موقعیت را از طریق پالس های سیگنال ارسال شده به اجزا تعیین می کند، که آنها را تفسیر می کند و ولتاژ متناسبی را به موتور می فرستد. ساخت و کنترل آنها نسبتاً ساده است، اما حداکثر جریان را دائماً جذب می کنند.
سروو موتور ها یکی دیگر از موتور های محبوب بازار سرگرمی هستند و برای کنترل موقعیت بدون دقت استفاده می شوند. کاربرد های محبوب آنها شامل برنامه های کنترل از راه دور مانند وسایل نقلیه اسباب بازی RC و روباتیک است. آنها از یک موتور، پتانسیومتر و یک مدار کنترل تشکیل شدهاند و بیشتر از طریق مدولاسیون عرض پالس (PWM)، از طریق ارسال پالس های الکتریکی به سیم کنترل کنترل می شوند. سروو ها می توانند AC یا DC باشند. سروو های AC می توانند نوسانات جریان بالاتری را تحمل کنند و برای ماشین آلات صنعتی استفاده می شوند، در حالی که سروو های DC برای کاربرد های سرگرمی کوچکتر هستند.
سه نوع اصلی موتور ها
سه نوع اصلی موتور های AC وجود دارد: القایی، سنکرون و صنعتی.
موتور های القایی به عنوان موتور های ناهمزمان شناخته می شوند، زیرا آنها با سرعت ثابت یکسانی حرکت نمی کنند یا کندتر از فرکانس ارائه شده نمی چرخند. اسلیپ یا لغزش، تفاوت بین سرعت واقعی و سنکرون، برای تولید گشتاور، نیروی پیچشی که باعث چرخش می شود، در موتور های القایی مورد نیاز است. میدان مغناطیسی که روتور این موتور ها را احاطه کرده است به دلیل جریان القایی ایجاد می شود.
روتور موتور های سنکرون با سرعت ثابتی که از AC تامین می شود می چرخد. میدان مغناطیسی آنها توسط آهنربا های دائمی ایجاد می شود. موتور های صنعتی برای کاربرد های سه فاز با قدرت بالا مانند نوار نقاله یا دمنده طراحی شده اند. موتور های AC را می توان در لوازم خانگی و سایر کاربرد ها مانند ساعت، فن و دیسک درایو نیز یافت.
هنگام خرید موتور باید به چه نکاتی توجه کرد؟
چندین ویژگی وجود دارد که هنگام انتخاب موتور باید به آنها توجه کنید، اما ولتاژ، جریان، گشتاور و سرعت (RPM) از همه مهمتر هستند.
جریان چیزی است که موتور را نیرو می دهد و جریان بیش از حد به موتور آسیب می رساند. برای موتور های DC، جریان کارکرد و استال یا واماندگی مهم است. جریان عملیاتی مقدار متوسط جریانی است که انتظار می رود موتور تحت گشتاور معمولی بکشد. جریان استال، گشتاور کافی برای موتور را اعمال می کند تا با سرعت توقف یا ۰RPM کار کند. این حداکثر مقدار جریانی است که موتور باید بتواند بکشد، و همچنین حداکثر توان زمانی که در ولتاژ نامی ضرب می شود.
ولتاژ برای حفظ جریان خالص در یک جهت و برای غلبه بر جریان برگشتی استفاده می شود. هر چه ولتاژ بیشتر باشد، گشتاور بیشتر است. رتبه بندی ولتاژ یک موتور DC کارآمدترین ولتاژ را در حین کار نشان می دهد. حتما ولتاژ توصیه شده را اعمال کنید. اگر ولتاژ بسیار کمی اعمال کنید، موتور کار نخواهد کرد، در حالی که ولتاژ زیاد باعث کوتاه شدن سیم پیچ ها می شود که منجر به از دست دادن توان یا تخریب کامل می شود.
سایر موارد مهم
مقادیر عملیاتی و استال نیز باید با گشتاور در نظر گرفته شود. گشتاور عملیاتی مقدار گشتاوری است که موتور برای ایجاد آن طراحی شده است و گشتاور استال مقدار گشتاور تولید شده هنگام اعمال قدرت از سرعت استال است. همیشه باید به گشتاور عملیاتی مورد نیاز نگاه کنید، اما برخی از برنامه ها از شما می خواهند که بدانید تا چه حد می توانید موتور را فشار دهید. به عنوان مثال، در یک ربات چرخدار، گشتاور خوب برابر با شتاب خوب است، اما باید مطمئن شوید که گشتاور استال به اندازه کافی قوی است تا وزن ربات را بلند کند. در این مورد، گشتاور مهمتر از سرعت است.
سرعت یا سرعت (RPM) می تواند در مورد موتور ها پیچیده باشد. قاعده کلی این است که موتور ها در بالاترین سرعت کار می کنند اما در صورت نیاز به چرخ دنده همیشه امکان پذیر نیست. اضافه کردن چرخ دنده ها راندمان موتور را کاهش می دهد، بنابراین کاهش سرعت و گشتاور را نیز در نظر بگیرید.
اینها اصولی هستند که باید هنگام انتخاب موتور در نظر بگیرید. هدف یک برنامه کاربردی و اینکه از کدام جریان برای انتخاب نوع موتور مناسب استفاده می کند را در نظر بگیرید. مشخصات یک برنامه کاربردی مانند ولتاژ، جریان، گشتاور و سرعت تعیین می کند که کدام موتور مناسب تر است، بنابراین حتما به الزامات آن توجه کنید.
معیارهای انتخاب الکتروموتور چیست؟
الکتروموتورها انجام انواع مختلف حرکت را امکان پذیر می کنند. در کاربردهای مختلف به الکتروموتورها نیاز است: ابتدا باید بین سه گروه اصلی الکتروموتورها یکی را انتخاب کنید:
- موتورهای ناهمزمان A (الکتروموتورهای تک فاز یا سه فاز)
- موتورهای سنکرون DC (جریان مستقیم) براشلس و غیره
- استپر موتور یا موتور پله ای
برای انتخاب یکی از این سه گروه؛ لازم است نوع کاربرد خود را تعیین کنید:
- اگر می خواهید موتور به طور مداوم و با تغییرام کم دنده کار کنید باید یک موتور آسنکرون را انتخاب کنید.
- برای کاربردهای دینامیکی داشتن یک موتور سنکردن ضروری است.
- در نهایت اگر به موقعیت یابی دقیقه نیاز دارید باید یک موتور پله ای انتخاب کنید.
بسته به حرکتی که نیاز دارید، باید مشخصات فنی و اندازه موتور را هم تعیین کنید:
- برای تعیین مشخصات فنی، تعیین قدرت، گشتار ور سرعت موتور ضروری خواهد بود.
- برای تعیین اندازه، باید بدانید که موتور چقدر فضا اشغال می کند و چگونه نصب می شود.
هنگام انتخاب ابعاد و استحکام موتور باید محیط صنعتی که موتور در آن کار می کند را هم در نظر بگیرید:
- یک فرمت مناسب برای هر نوع محیط (منفجره؛ مرطوب، خورنده، دمای بالا و غیره) وجود دارد.
- برای محیط های خشم موتورهایی با پوشش های تقویت شده، ضد آب، مقاوم در برابر ضربه یا مقاوم در برابر خاک وجود دارد.
در نهایت در سال های اخیر بهره وری انرژی به یک عامل مهم در هنگام خرید الکتروموتور تبدیل شده است. الکترموتوری که انرژی کمتری مصرف می کند، باعث کاهش هزینه برق می شود.
چگونه از بین الکتروموتورهای AC و DC انتخاب داشته باشیم؟
این دو نوع موتور ساخت متفاوتی دارند:
مهم ترین تفاوت در منبع تغذیه است: جریان متناوب (تک فاز یا سه فاز) و جریان مستقیم (DC) برای مثال برای باتری ها
سرعت تفاوت دیگر این دو نوع موتور است. سرعت یک موتور DC با تغییر جریان در موتور کنترل می شود در حالی که سرعت یک موتور AC با تغییر فرکانس، معمولا با مبدل فرکانس کنترل می شود.
الکتروموتور AC
الکتروموتور AC محبوب ترین گزینه صنعتی هستند زیرا مزایای زیر را ارائه می دهند:
- ساخت ساده ای دارد.
- به دلیل مصرف انرژی کمتر، مقرون به صرفه تر هستند.
- آنها مستحکم تر هستند و بنابراین طول عمر بیشتری دارند.
- نیاز به نگهداری کمی دارند
به دلیل نحوه عملکرد آنها که شامل همگام سازی بین چرخش روتور و فرکانس جریان است، سرعت موتورهای AC ثابت می ماند. آنها برای کاربردهایی که نیاز به حرکت مداوم یا تغییرات اندک دنده دارند مناسب هستند. بنابراین این نوع موتور برای استفاده در پمپ ها، نوار نقاله ها و فن ها در نظر گرفته می شوند. آنها همچنین می توانند رد سیستم هایی ادغام شوند که در صورت استفاده با سرعت متغییر به دقت بالایی نیاز ندارند. از طرف دیگر عملکردهای کنترل سرعت آنها را نسبت به سایر موتورها گرانتر می کند.
انواع الکتروموتور AC
دو نوع الکتروموتور AC وجود دارد:
- موتور تک فاز
- موتور سه فاز
ویژگی های موتورهای تک فاز :
- توان الکتریمی (بر حسب کیلو وات) گشتاور را تعیین می کند.
- تعداد قطب ها سرعت چرخش را تعیین می کند.
- روش اتصال فلنج (B14، B5) با براکت (B3)
- بهره وری
- کمتر صنعتی هستند چون قدرت کمتری دارند.
- آنها را می توان در شبکه برق خانگی استفاده کرد.
ویژگی های موتورهای سه فاز:
- معماری که اجازه می دهد تا توان الکتریکی بسیار بیشتری نسبت به موتورهای تک فاز منتقل شود.
- استفاده از آنها در محیط های صنعتی (تا ۸۰ درصد)
- استفاده از آنها برای زیرساخت ها و تجهیزاتی که به توان الکتریکی بالایی نیاز دارند
الکتروموتور DC
موتورهای DC همچنین در محیط های صنعتی بسیار رایج هستند زیرا مزایای قابل توجهی را ارائه می دهند که از این بین می توان به موارد زیر اشاره کرد:
- آنها دقیق و سریع هستند.
- سرعت آنها را می توان با تغییر ولتاژ کنترل کرد.
- نصب آنها حتی در سیستم های متحرک یا دارای باتری ساده است.
- گشتارو شروع بالایی دارد.
- شروع، توقف، شتاب گیری و معکوس کردن به سرعت انجام می شود.
آنها برای کاربردهای دینامیکی که نیاز به دقت بالایی دارند (به ویژه از نظر سرعت) مانند آسانسورها یا از نظر موقعیت مانند ربات ها بسیار مناسب هستند. آنها همچنین می توانند برای کاربردهایی که به توان بالا (مثلا ۱۰۰۰۰ کیلو وات) نیاز دارند سودمند باشند. با این حال آنها بسته به ساختار خود در مقایسه با موتورهای AC دارای معایب خاصی هستند:
- کمتر رایج هستند زیرا برای کاربردهایی که نیاز به توان بالا دارند کمتر مناسب هستند.
- آنها از قطعات زیادی تشکیل شده اند که فرسوده می شوند و تعویض آنها گران است.
انواع الکتروموتور DC
دو نوع متداول موتورهای DC شامل:
- موتورهای برس خورده
- موتورهای براشلس
می شود.
موتورها برس خورده ساده ترین و پرکاربردترین انواع موتورها هستند به ویژه برای تجهیزات اولیه صنعتی و کاربردهای کم هزینه. این موتورها دارای مزایای زیر هستند:
- کنترل آنها ساده است
- گشتاور در دورهای پایین بسیار خوب است.
- آنها ارزان هستند.
انواع موتور برس خورده
بسته به کاربرد مورد نظر شما ۴ نوع موتور برس خورده وجود دارد:
Series-wound: در این نوع موتورها، استاتور به صورت سری به روتر متصل می شود و با تغییر ولتاژ تغذیه، سرعت کنترل می شود. با این حال این نوع کنترل نسبتا ضعیف است. به محض افزایش گشتاور سرعت کاهش پیدا می کند. این نوع موتور در اتومبیل یا جرثقیل استفاده می شود.
Shunt-wound: در این نوع موتورها، استاتور به صورت موازی به روتور متصل می شود که با افزایش جریان موتور، گشتاور بیشتری را بدون کاهش سرعت ایجاد می کند. این نوع موتور برای کاربردهایی با سرعت ثابت مانند جاروبرقی یا نوار نقاله مناسب است.
Compound wound : این نوع موتور ترکیبی از ساختار دو موتور بالا است. در نتیجه گشتاور راه اندازی بالا و همچنین تغییرات سرعت بالاتر را ارائه می دهد. این نوع موتور برای آسانسور، پمپ های گریز از مرکز و کمپرسور مناسب هستند.
Permanent magnet: این نوع موتور دارای یک آهنربای دائمی است که گشتاور کم را فراهم می سازد. از این نوع موتور در کاربردهایی که نیاز به کنترل دقیق دارند مانند روباتیک استفاده می شود.
معایب موتورهای برس خورده
همه موتورهای برس خورده دارای معایبی هستند:
- آنها نسبت به موتورهای براشلس کارایی کمتری دارند (۷۵ تا ۸۰ درصد نسبت به ۸۵ تا ۹۰ درصد موتورهای براشلس)
- طول عمر آنها کوتاه است زیرا برس ها به دلیل اصطکاک با گذشت زمان فرسوده می شوند.
- قوس برس ها و کلکتور می تواند نویز الکترومغناطیسی ایجاد کند که می تواند آتش سوزی ایجاد کند.
- خطر جرقه ناشی از اصطکاک، استفاده از این نوع موتور را در محیط های انفجاری نامطلوب می کند.
- سرعت به طور کلی به دلیل گرم شدن برس ها محدود است.
- برس های ساخته شده از گرافیت گرد و غبار تولید می کنند که می تواند به دستگاه های دیگر سیب برساند.
- آنها به روغن کاری نیاز دارند که استفاده از آنها در جاروبرقی را غیر ممکن می کند.
موتورهای براشلس
موتورهای براشلس برخی از نقاط ضعف موتورهای برس دار را جبران می کنند. اما دارای مزایای دیگری هم هستند:
- آنها می توانند در سرعت های بالاتر (تا ۱۰۰۰۰۰ دور در دقیقه در مقایسه با ۲۰۰۰۰ دور در دقیقه موتورهای برس خورده) کار کنند.
- آنها طول عمر طولانی تری دارند(بیش از ۱۰۰۰۰ ساعت کارکرد)
- آنها قابل اعتمادتر و کارآمدتر هستند.
- هیچ قطعه سایشی به غیر از یاتاقان ها وجود ندارد و عملیات تعمیر و نگهداری را کاهش می دهد.
این واقعیت که این موتورها می توانند در سرعت های بسیار بالا کار کنند آنها را برای فن، اره یا آسیبا مناسب می کند.
معایب موتورهای براشلس
موتورهای براشلس به طور سیستماتیک مجهز به زمرگذار هستند، سنسوری که امکان سوئیچینگ الکترونیکی و تعیین موقعیت روتور را فراهم می کند. بنابراین این موتورها برای کاربردهای دقیق سروموتور مناسب هستند. با این حال آنها دارای معایب خاصی هستند:
- هزینه اولیه زیاد است زیرا لازم است یک دستگاه سوئیچینگ اختصاصی (کنترل کننده) ادغام شود
- آنها همچنین به طور کلی به یک کاهنده دنده در کاربردهای درایو نیاز دارند.
چرا باید برای خرید الکتروموتور پله ای اقدام کنیم؟
یک موتور پله ای یا استپر یک پالس الکتریکی را به یک حرکت زاویه ای تبدیل می کند. برای کاربردهایی که نیاز به کنترل موقعیت حلقه باز دارند، مفید است. سه دسته موتور پله ای وجود دارد:
The variable reluctance motor یا موتور رلوکتانس متغیر: با شخصات الکتریکی یکسان؛ این نوع موتور از یک موتور آهنربای دائمی قدرتمند و سریعتر است.
The permanent magnet motor یا موتور آهنربای دائمی: یک موتور کم هزینه
The hybrid motor یا موتور هیبریدی: این نوع موتور ترکیبی از دو نوع تکنولوژی بالا را به همراه دارد اما گرانتر است. این موتور مزیت گشتاور بهتر و سرعت بالاتر را به همراه دارد.
موتورهای آهنربای دائمی و هیبریدی متداول ترین موتورهای مورد استفاده هستند زیرا دارای مزایای خاصی هستند:
- دقیق هستند
- ارزان هستند
- محکم هستند
- ساخت و ساز ساده ای دارند
- گشتاور در هگام راه اندازی و در سرعت های پایین زیاد است.
با این حال آنها دارای معایبی هم هستند:
- سرعت و گشتاور نسبتا پایین است.
- با افزایش سرعت، گشتاور به شدت کاهش پیدا می کند.
- آنها ارتعاشاتی را ایجاد می کنند که می توانند مشکلاتی را ایجاد کنند.
- خطر گرم شدن بیش از حد وجود دارد.
هنگام خرید موتور پله ای توجه به موارد زیر ضروری است:
- گشتاور و بار
- تعداد استپ
- ابعاد موتور (وزن، فلنج های نصب و غیره)
- قیمت
نکات مهم برای خرید بهترین الکتروموتور
در ادامه به توضیح مهمترین نکانی که هنگام خرید بهترین الکتروموتور باید مد نظر داشته باشید خواهیم پرداخت:
توان اسمی را تعیین کنید
توان اسمی یک الکتروموتور معمولا بر حسب کیلووات (KW) بیان می شود. در موتورهای قدیمی تر، قدرت ممکن است بر حسب اسب بخار (hp) هم بیان شود که ۱HP = 0,75kW .
در زیر نمونه ای از پلاک نسل قدیمی الکتروموتور زیمنس را مشاهده خواهید کرد. قدرت یک الکتروموتور بر اساس حداکثر توان برای بار ثابت است. که در این مثال، الکتروموتور دارای قدرت اسمی ۱٫۵ کیلووات یا ۲ اسب بخار است.
روش نصب الکتروموتور را تعیین کنید
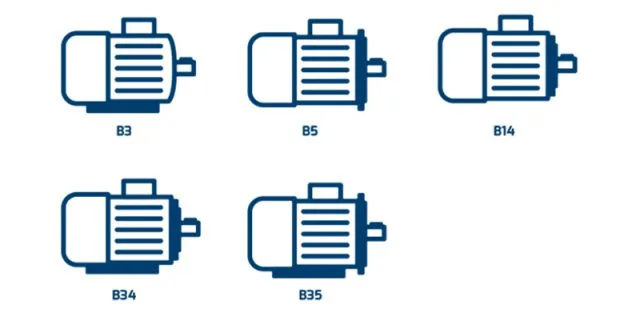
یک الکترومور را می توان به روش های مختلفی نصب کرد به طور مثال فقط با یک پایه، یک فلنج داخلی، یک فلنج بیرونی یا ترکیبی از آنها. طراحی یا روش نصب الکتروموتور با کدی از استاندارد IEC 34-7 اروپا تعریف شده است. ۵ روش رایج نصب الکتروموتور عبارتند از:
B3 : فقط پایه
B5 : فقط فلنج بیرونی (قطر فلنج بیشتر از قطر موتور است)
B14 : فلنج داخلی (قطر فلنج کوچکتر از موتور است)
B35 : پایه نصب شده + فلنج بیرونی (ترکیب B3 و B5)
B34: پایه نصب شده + فلنج داخلی (ترکیب B3 و B14)
طرح را اغلب می توان از روی پلاک خواند. با این حال با استفاده از تصویر زیر می توان آن را تعیین کرد.
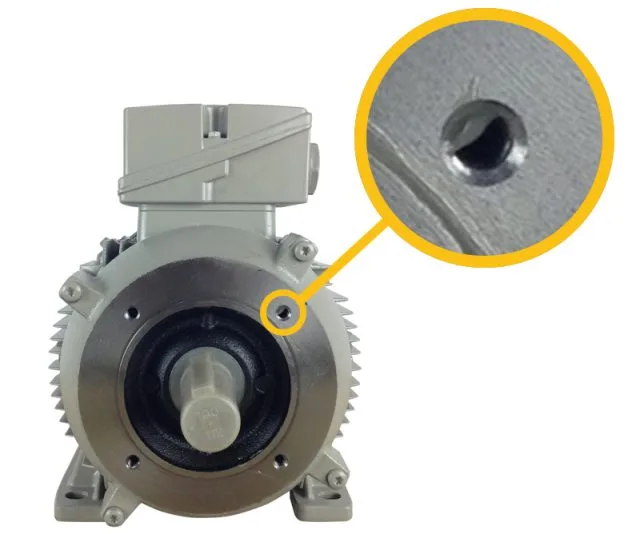
الکتروموتور مثال ما دارای نوع نصب B14 است یعنی دارای یک فلنج داخلی است. این طرح را می توان با سوراخ های رزوه شده در موتور تشخیص دارد. برای طراحی B5 قطر فلنج از قطر موتور بیشتر است و پیچ و مهره ها بدون رزوه هستند.
نکته:
برای افزایش احتمال پیدا کردن الکتروموتور مناسب، اگر به موتوری با نصب B14 نیاز دارید هر دو B14 و B34 را انتخاب کنید زیرا اکثرموتورهای عرضه شده توسط ABF دارای قابلیت جابجایی هستند. با جدا کردن پایه های یک موتور B34 در نهایت به B14 دست پیدا خواهید کرد.
نمای جلوی موتور B34 : ترکیبی از فریم داخلی با سوراخ های رزوه دار (B14) و موتور پایه دار (B3)
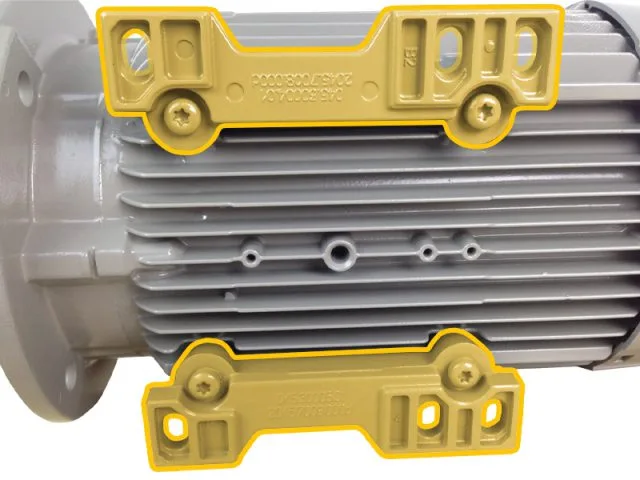
نمونه ای از الکتروموتور با پایه های قابل تعویض
سرعت اسمی را تعیین کنید
سرعت اسمی معمولا روی پلاک قید شده است. این سرعت چرخشی واقعی شفت خروجی است که با دور در دقیقه یا RPM توصیف می شود. دور در دقیقه روی پلاک زیر، ۲۸۶۰۰ دور در دقیقه است. یک راه جایگزین برای بیان این سریعت با فهرست کردن تعداد قطب هاست. یک موتور ۲ قطبی دارای سرعت ۳۰۰۰ دور در دقیقه است در حالی که یک موتور ۴ قطبی دارای سرعت ۱۵۰۰ دور در دقیقه و ی موتور ۶ قطبی دارای سرعت ۱۰۰۰ دور در دقیقه است و الی آخر.
به دلایل فنی، سرعت واقعی شفت همیشه کمی انحراف دارد و کمتر از ارقام داده شده در بالا است. بنابراین مطمئن شوید که همیشه به سرعت مناسب دست پیدا می کند. قانون کلی این است که سرعت موتور = ۶۰۰۰ تقسیم بر تعداد قطب ها. بنابراین یک موتور ۴ طقبی دارای سرعت ۶۰۰۰ تقسیم بر ۴ = ۱۵۰۰ دور در دقیقه است. در تصویر زیر یک نمای کلی از چرخش های تئوری در دقیقه و تعداد قطب های مربوطه آورده است.
اندازه فریم را تعیین کنید
اندازه فریم الکتروموتور یکی دیگر از ویژگی های مهم است. همانطور که ابعاد بازار اروپا در استاندارد IEC تعیین شده است، الکتروموتورها با مارک های مختلف اما ویژگی های مشابه؛ اغلب قابل تعویض هستند. اکر سازندگام ابعاد یکسانی را برای یک اندازه خاص استفاده می کنند. مهمترین ابعاد طبق استاندارد IEC به قرار زیر است:
A: فاصله بین سوراخ های نصب، عمود بر موتور
B: فاصله بین سوراخ های نصب شده، موازی با موتور
C: شانه شفت تا اولین سوراخ نصب
D: قطر شفت خروجی در انتهاب محرک DE
E: طول شفت
H: ارتفاع شفت
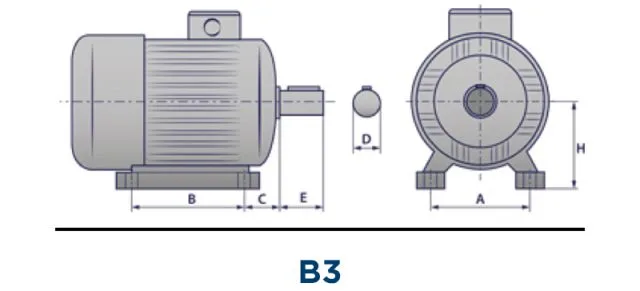
برای الکتروموتورهایی که به استانداردهای IEC پایبند هستند، بیشتر ابعاد به طور مستقیم با ارتفاع شفت یا اندازه فریم موتور در ارتباط است. این فاصله بین مرکز شفت خروجی و مرکز و پایین پایه های یک موتور به سبک B3 است. همانطور که در تصویر زیر با حرف H نشان داده شده است.
تعیین کلاس بازده صحیح
از ۱۶ ژوئن سال ۲۰۱۱ اکثر موتورها مورد در بازار با مطابق با دستورالعمل IE علامت گذاری شده و بر اساس یک کلاس بازدهی دسته بندی شوند. کلاس های بازدهی برای الکتروموتورها عبارتند از:
IE1 = راندمان استاندارد (EFF2)
IE2 = راندمان بالا (EFF1)
IE3 = راندمان برتر
IE4 = راندمان فوق العاده
از ۱ ژانویه ۲۰۱۷، تمام الکتروموتورها جدید با توان ۰٫۷۵ کیلووات یا بالاتر باید استاندارد IE3 را راعایت کنند (اما استثناهایی در این قانون وجود دارد). در مثال ما الکتروموتو دارای بازده انرژی IE1 است.
منابع: bearing و directindustry