در این مقاله ما اطلاعاتی در مورد نحوه پیدا کردن موتور ربات مناسب را در اختیار شما قرار می دهیم. بدون محرک، ربات ها فقط اجسامی فلزی یا پلاستیکی با هر چیز دیگری هستند که کاری نمی توانند انجام دهند. موتورها در مکانیسم ربات ها نقش مهمی دارند؛ آنها ربات ها را به اطراف می چرخانند؛ برخی دیگر مفصل های ربات را حرکت می دهند و با به آنها کمک می کنند تا اجسامی را بلند کنند. بنابراین انتخاب موتور ربات مناسب برای موفقیت آنها از اهمیت بالایی برخوردار است.
محرک های ربات
در بازار انواع موتور ربات را می توان پیدا کرد که از طراحی و اصول کار بسیار متفاوتی برخوردار هستند. با این حال اکثر آنها از یکی از سه نوع محرک زیر استفاده می کنند:
- پنوماتیک
- هیدرولیک
- الکتریکی
محرک پنوماتیک از نیروی هوای فشرده استفاده می کند. این موتورها به دلیل داشتن تعداد کمی از قطعات متحرک؛ ارزانتر و پاسخگوتر هستند اما از نظر سرعت و کنترل جایگاه پایین تری دارند. در صنعت رباتیک؛ مکانیزم ها بیشتر در برنامه های خاموش و روشن کردن یا انتخاب و قرار دادن استفاده می شوند.
اگر ربات شما بزرگ است یا قرار است بارهای زیادی را حمل کند؛ درایوهای هیدرولیک توجه شما را به خود جلب می کنند. عملکرد آنها بر مبنای تبدیل انرژی از سیال به کار مکانیکی است. گرچه مکانیسم های هیدرولیکی سرعت و هماهنگی دقیق حرکت را تضمین می کنند و نسبت قدرت به وزن مناسبی دارند؛ اما پر سر و صدا و حجیم هستند. خطرات مربوط به نشتی یا تغییر ویژگی های سیالات با تغییرات دمایی وجود دارد.
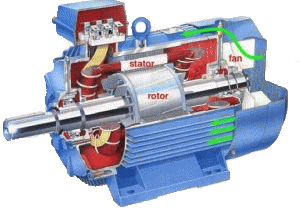
الکتروموتورها یکی از دستگاه های الکترومکانیکی هستند که با تبدیل انرژی الکتریکی به مکانیکی ایجاد حرکت می کنند. این محرک ها در صنعت رباتیک گزینه اولویت دار هستند چون:
- الکتروموتورها برای همه اندازه های ربات مناسب می باشند.
- آنها جمع و جور و سبک هستند اما دارای نسبت تبدیل قدرت عالی؛ دقت و تکرار پذیری عالی هستند.
- آلودگی در محیط آنها صفر است.
- سیستم های الکتریکی قوی هستند که نگهداری ساده ای دارند.
الکتروموتورها
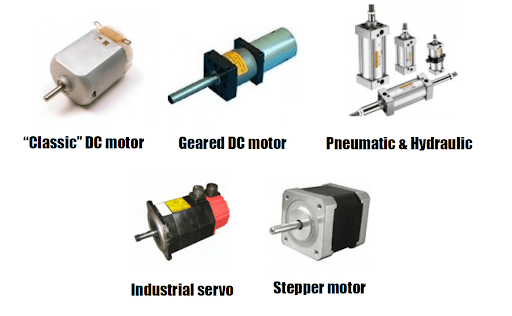
اگر به صورت عمیق تری محرک های الکتریکی را بررسی کنیم؛ همه چیز پیچیده تر می شود. آنها دارای انواع متفاوتی از جمله:
- موتورهای AC یا جریان متناوب
- موتورهای DC یا جریان مستقیم
- موتورهای سروو
- استپرها
هستند. توجه داشته باشید که این لیست کامل نیست و گونه های دیگر را می توان به این دسته بندی اضافه کرد.
موتورهای AC محرک های الکتریکی هستند که با جریان متناوب (برق پریز دیواری) تغذیه می شوند. آنها می توانند سنکرون یا آسنکرون باشند.
چرخش مکانیسم های AC سنکرون با فرکانس خط AC هماهنگ می شود. عمدتا این دستگاه ها در ماشین آلاتی استفاده می شوند که نیاز به سرعت خروجی دقیق و ثابت دارند. دستگاه های آسنکرون بر القای الکترومغناطیسی تکیه می کنند. جریان متناوب عبوری از سیم پیچ استاتور باعث ایجاد میدان الکترومغناطیسی می شود؛ بنابراین روتور را مجبور به تغییر می کند.
برای یک ربات موتورهای سنکرون و آسنکرون به دلیل ابعاد چشمگیرشان کمتر انتخاب می شوند. شما می توانید با دستگاه های صنعتی مقیاس بزرگ روبرو شوید که نیاز به مقدار زیادی گشتاور یا اتصال مستقیم به شبکه اصلی دارند.
موتورهای DC با جریان مستقیم (به عنوان مثال از باتری) تغذیه می شوند. آنها در اندازه ها و ولتاژ های مختلفی در دسترس هستند و می توانند در محدوده سرعت و بار وسیع به طور مطمئن کار کنند. این موتورهای دارای سیستم واکنش سریع و کنترل ساده هستند که به شما امکان می دهد بدون هماهنگی سریع؛ سرعت حرکت را کم کرده؛ سرعت حرکت را معکوس کنید.
گرچه محرک های DC سرعت خروجی بالا را ارائه می دهند اما گشتاور آنها معمولا کم است. برای ساخت موتور DC مناسب برای بلند کردن بارهای سنگین یا رانندگی با ربات، باید یک گیربکس به سیستم خود اضافه کنید. چرخ دنده ها سرعت چرخش را کاهش می دهند در حالی که گشتاور را افزایش می دهند.
برای جلوگیری از مشکلات سفارشی سازی و عملکرد، گیربکس و اجزای محرک باید به گونه ای طراحی شوند که با یکدیگر کار کنند. بنابراین ایده خوبی است که موتوری بخرید که قبلا با گیربکس یکپارچه شده است.
همچنین می توان موتورهای DC براشلس و براش را پیدا کرد. موتورهای DC براش دارای برس و کموتاتور هستند که جریان را از منبع تغذیه به آرمیچر در هسته دستگاه منتقل می کنند. این محرک ها ارزان هستند و به راحتی در بازار موجود هستند. با این حال موتورهای براش پر سر و صدا هستند و با گذشت زمان ساییده می شوند و در نتیجه عملکرد آنها بدتر می شود.
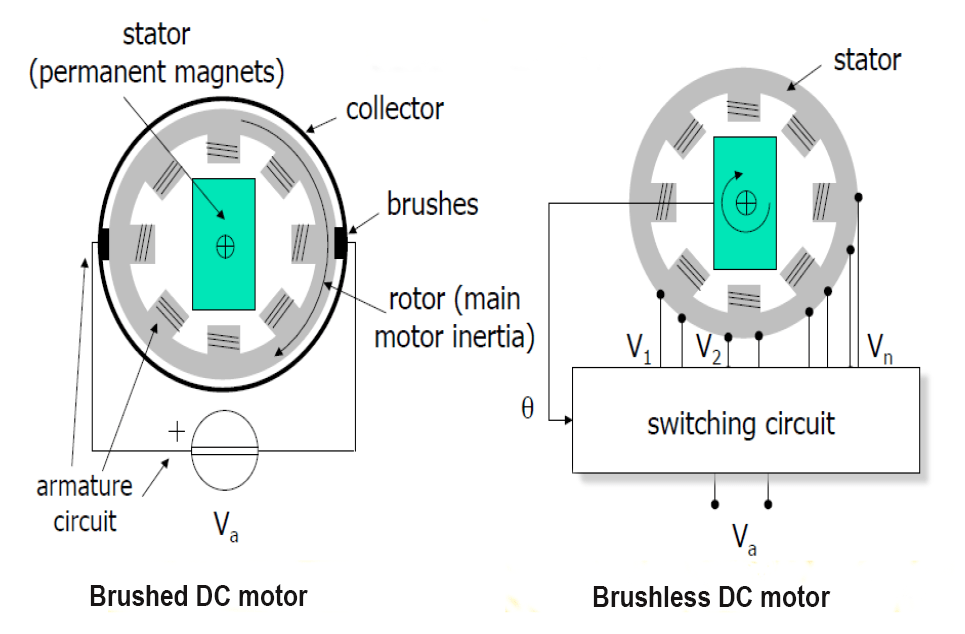
مکانیزم موتور DC براشلس عمر مفید را افزایش داده و قابلیت اطمینان قابل توجهی را نشان می دهد. در مقایسه با نمونه های براش، انها کارآمدتر هستد، صدای کمتری تولید می کنند و مستعد سایش نیستند. با این حال، دستگاه های براشلس گران تر از دستگاه های براش هستند و برای جایگزینی جابجایی مکانیکی نیاز به هماهنگی حرکت پیچیده تری دارند.
سروو موتورها دارای یک سیستم کنترل حلقه بسته با یک کنترلر و یک دستگاه فیدبک هستند که برنامه ریزی کامل حرکات و تنظیم خطاهای آنی را امکان پذیر می کند.
برای یک ربات موتورها مزایای ارزشمندی را ارائه می دهند:
- موقعیت دقیق: یک سروو موتور به مختصات تحت فرمان می رسد و تا زمانی که فرمان دیگری را دریافت نکند؛ موقعیت را حفظ می کند.
- اقتصادی از نظر فضا، اما قادر به تولید گشتاور قابل توجه است.
- با صرفه جویی در مصرف انرژی؛ در زمان بیکاری انرژی مصرف نمی کند.
- این محرک ها پر هزینه هستند و به منطق کنترلی پیچیده و تنظیم دقیق نیاز دارند.
استپرها، همانطور که از نامش پیداست؛ بر اساس مراحلی می چرخند، جایی که هر مرحله تعداد مشخصی از درجه است. آنها موقعیت دقیق را ایجاد می کنند و گشتاور نگهدارنده بالایی را تولید می کنند (از جمله در سرعت های پیانن). هنگامی که این محرک ها به صورت گام به گام حرکت می کنند، نیازی به کنترل حلقه بسته نیست. با شمارش پالش های مرحله ورودی می توانید میزان حرکت یک موتور را تعیین کنید.
در نزدیکی حداکثر سرعت، خروجی گشتاور آن کمتر از سروو موتور است. استپرها می توانند در صورت بارگیری زیاد مراحل را از دست بدهند و حتی در حالت آماده به کار هم برق مصرف کنند. بعد از اینکه درایو را خاموش کردید ممکن است در مورد زاویه راه اندازی ان سردرگم شده باشید.
استپرها به عنوان موتورهای ربات در نظر گرفته می شوند. این دستگاه ها از آلیاژهایی ساخته شده اند. برای بدست آورده ایده نحوه عملکرد آنها یک تکه سیم فلزی را تصور کنید که با اعمال ولتاژ به آن کوچک می شود و با خاموش کردن آن به حالت اولیه خود باز می گردد. حرکت حاصله بدون سر و صدا و به صورت هموار انجام می شود.
نکاتی برای انتخاب موتور ربات
پیدا کردن موتور ربات در میان انواع مختلف محصولات موجود در بازار می تواند کار سختی باشد. برای نزدیک شدن به مرحله خرید موتور ربات سوالات زیر را از خود بپرسید:
در ربات به چه چیزی نیاز دارید؟ به طور مثال دستگاه باید کوچک و در عین حال قدرتمند باشد. قابلیت تنظیم خواب اجباری را داشته باشد اما سرعت آن زیاد مهم نیست.
چرا شما به آن نیاز دارید؟ به عنوان مثال شما شرکت های کوچک و متوسط را به عنوان مشتریان آینده خود مورد هدف قرار می دهید. به طور معمول آنها فضا و بودجه محدودی دارند و ربات ها را برای انجام کارهای تکراری که برای انسان کارآمد نیست خریداری می کنید.
حالا کافیست که جزئیات و ویژگی های اساسی موتور ربات خود را مد نظر داشته باشید. به طور مثال روی موارد زیر تمرکز داشته باشید:
بار: درایوهای انتخاب شده باید بتوانند گشتاور کافی برای غلبه بر نیروهای موثر بر مکانیسم شما در حین حرکت و جابجایی بار محاسبه شده تولید کنند.
سرعت: یک موتور ربات باید بتواند دستگاه شما را با سرعتی مناسب برای کارهای مورد نظر خود؛ به عنوان مثال بلند کردن یک شیء از نقاله نگه دارد.
دقت: در نظر بگیرید که آیا می توانید باعث شوید که محرک ها دقیقا به جایی که می خواهید حرکت کنند.
تکرار پذیری: یک موتور ربات باید بتواند هر از گاهی با دقت بی وقفه به موقعیت های مد نظر برسد.
قابلیت اطمینان: شما باید بدانید که ایا موتور شما شامل قطعات پوشیدنی است یا میانگین زمان بین خرابی های یا عمر مفید تضمینی چقدر است.
مصرف برق: به نحوه تغذیه ربات (مثالا از منبع AC یا DC) و میزان مصرف برق آن فکر کنید.
هزینه: به عنوان یک قاعده، قیمت ارزان به معنی کیفیت پایین است. با این حال اگر یک موتور ارزان (مثل موتور هیدرولیک) برای اهداف شما کافی است شاید لازم نباشد به سراغ استپرها با موتورهای سروو با قیمت بالاتر بروید.
فرم فاکتور: مطمئن شوید که موتور سروو را از نظر اندازه و طراحی با ربات ها یا اجزای خاص آن مطابقت داده اید یا سفارشی سازی کرده اید.
از توصیه های فوق برای تهیه چک لیست انتخابی خود برای موتور ربات استفاده کنید یا با ما تماس بگیرید تا در مورد خرید موتور مناسب برای ربات به شما کمک کنیم.